Capture Single Color Frame
SUMMARY
Capture Single Color Frame acquires one color frame from the camera and returns it as a NumPy array, ready to be logged, processed, or saved. It is the simplest operation against any 2D or 3D camera and the foundation of vision pipelines that don't need continuous streaming.
Available on: IDS, Webcam, Intel RealSense.
The Skill
image = camera.capture_single_color_frame()Example
IDS
Webcam
Intel RealSense
The Code
"""
Connect to an IDS camera, get/set parameters, capture an image, and disconnect.
Run from a terminal to avoid issues with Rerun's spawn mode.
"""
from loguru import logger
import rerun as rr
from telekinesis.medulla.cameras import ids
def main():
camera = ids.IDS(
name="my_ids_camera",
serial_number="4108909352",
load_factory_defaults=False,
)
try:
rr.init("IDS_Example", spawn=True)
camera.connect()
logger.info(f"ExposureTime: {camera.get_parameter('ExposureTime')}")
camera.set_parameter('ExposureTime', 35000.0)
image = camera.capture_single_color_frame()
rr.log("Single_Image_Capture", rr.Image(image))
except Exception as e:
logger.error(f"Unable to capture image. {type(e).__name__}: {e}")
finally:
camera.disconnect()
if __name__ == "__main__":
main()"""
Connect to a webcam, capture a single color frame, and disconnect.
Run from a terminal to avoid issues with Rerun's spawn mode.
"""
from loguru import logger
import rerun as rr
from telekinesis.medulla.cameras import webcam
def main():
camera = webcam.Webcam(name="my_webcam", camera_id=0)
try:
rr.init("Webcam_Example", spawn=True)
camera.connect()
image = camera.capture_single_color_frame()
rr.log("Single_Image_Capture", rr.Image(image))
except Exception as e:
logger.error(f"Unable to capture image. {type(e).__name__}: {e}")
finally:
camera.disconnect()
if __name__ == "__main__":
main()"""
Connect to a RealSense camera, capture a single color frame, and disconnect.
Run from a terminal to avoid issues with Rerun's spawn mode.
"""
from loguru import logger
import rerun as rr
from telekinesis.medulla.cameras import realsense
def main():
camera = realsense.RealSense(name="my_realsense")
try:
rr.init("RealSense_Capture_Example", spawn=True)
camera.connect()
image = camera.capture_single_color_frame()
rr.log("Single_Image_Capture", rr.Image(image))
except Exception as e:
logger.error(f"Unable to capture image. {type(e).__name__}: {e}")
finally:
camera.disconnect()
if __name__ == "__main__":
main()The Explanation of the Code
After connect has opened the device, capture_single_color_frame acquires one color frame and returns it as a NumPy array. The returned array is RGB-ordered and can be passed directly to Rerun (rr.Image) or any downstream processing step.
image = camera.capture_single_color_frame()
rr.log("Single_Image_Capture", rr.Image(image))Per-camera behavior:
- IDS — switches the camera to
SingleFrameacquisition mode, triggers one exposure, waits for the buffer to fill, and converts the raw buffer to a color image. Parameters such asExposureTimecan be tuned beforehand withset_parameter; see the IDS code tab above. - Webcam — reads one frame from the OpenCV
VideoCapturedevice and converts it from BGR to RGB. - RealSense — activates the color stream, retrieves one frame, and returns it as a NumPy array.
The disconnect call lives in a finally block so the device is released regardless of whether the capture succeeded.
Running the Example
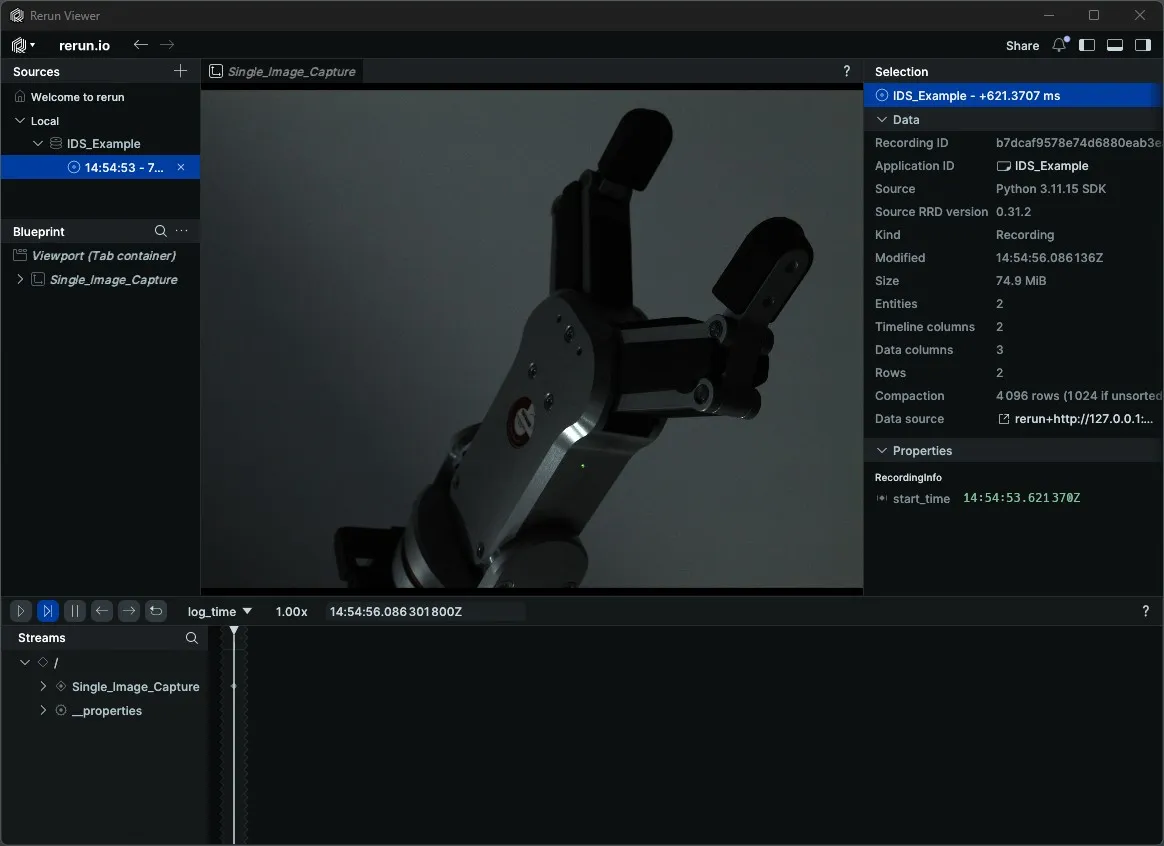
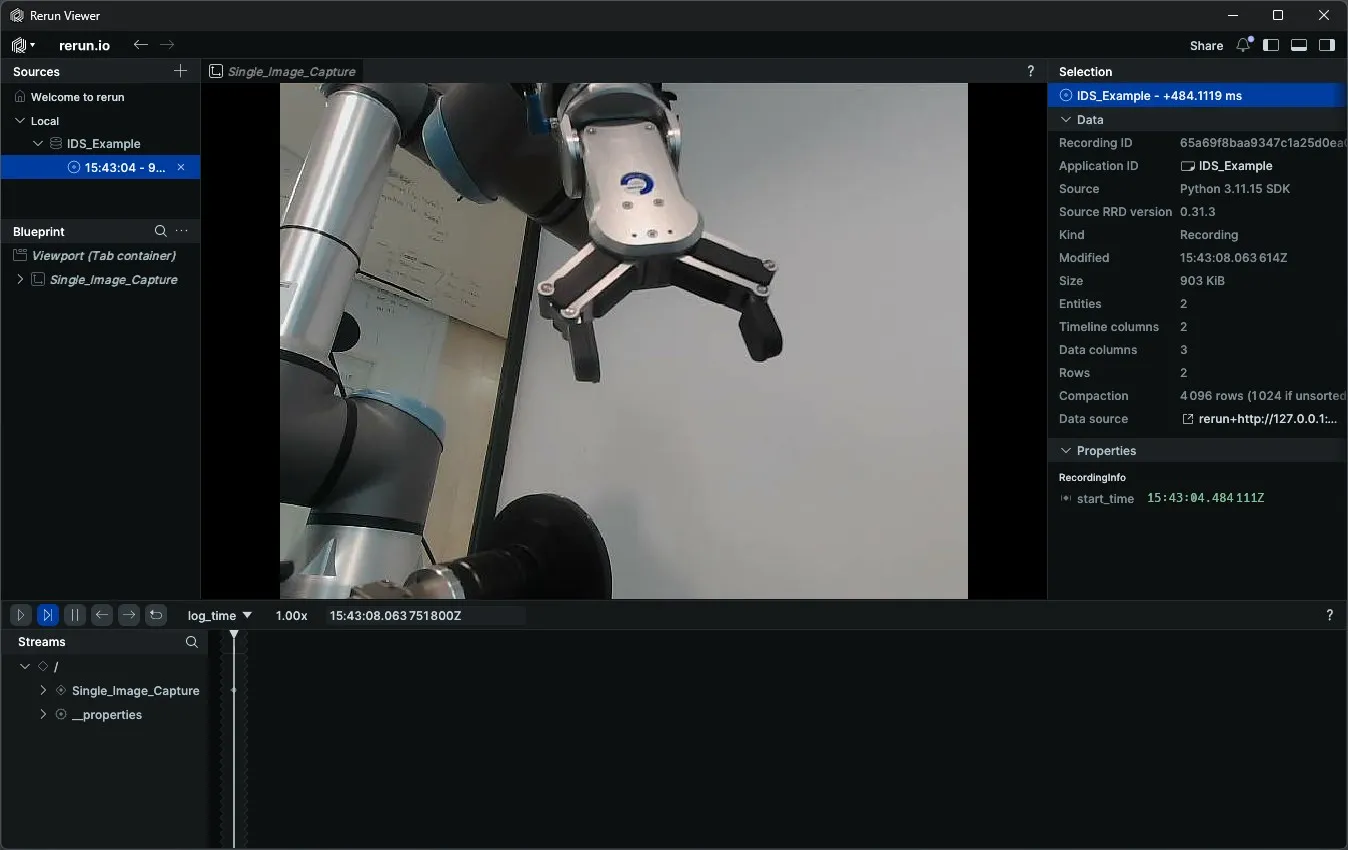
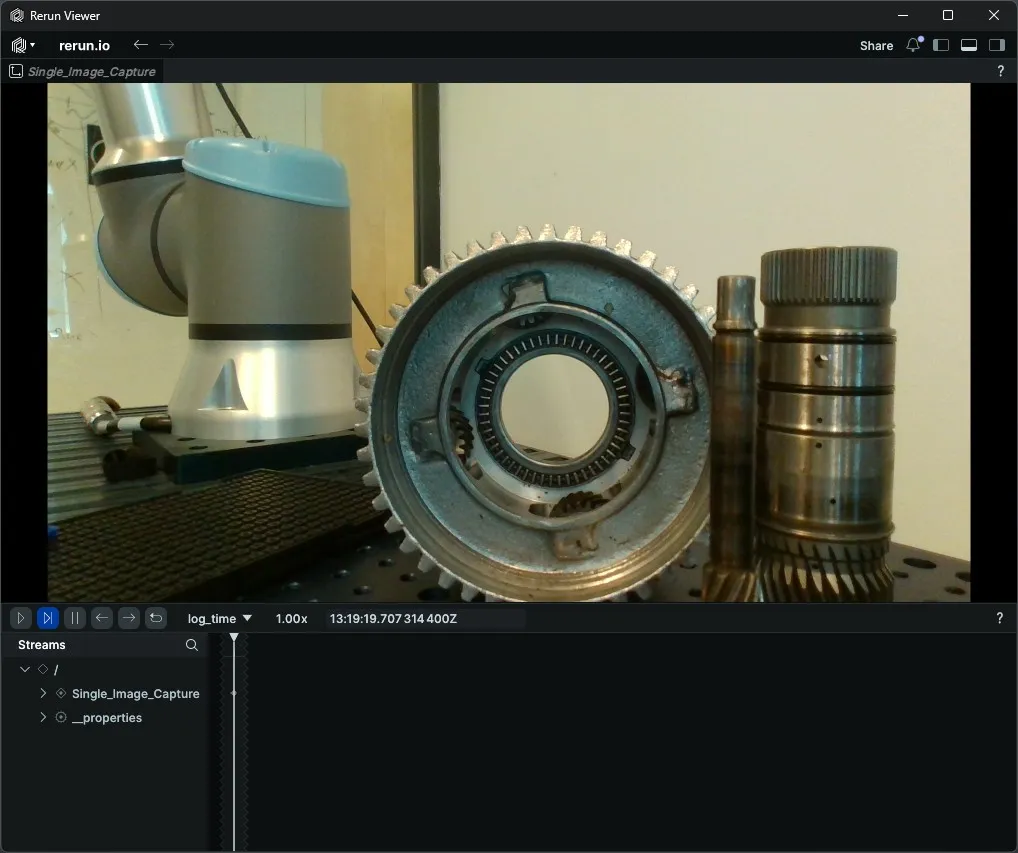
python capture_image_example.pyA Rerun viewer opens automatically. The captured frame appears under Single_Image_Capture once acquisition completes.
Where to Use the Skill
- Calibration and snapshot workflows — capture a single reference image to seed downstream processing.
- Triggered inspection — acquire one frame on demand instead of running a continuous stream.
- Pipelines that don't require video — feed Cornea or other vision modules with a single frame at a time.