RealSense: Capture Single Depth Image
SUMMARY
Connect to a RealSense camera, capture a single depth frame, apply a colour map for visualisation, and inspect the result in Rerun.
Example
Code
"""
A simple example demonstrating how to connect to a RealSense camera, capture an
image and disconnect from the camera when finished.
Please run this example from a terminal to avoid issues with rerun's spawn mode.
"""
from loguru import logger
import rerun as rr
from telekinesis.medulla.cameras import realsense
def main():
camera = realsense.RealSense(
name="my_realsense",
)
try:
rr.init("RealSense_Capture_Example", spawn=True)
camera.connect()
depth_image = camera.capture_single_depth_frame()
rr.log(
"Single_Depth_Image_Capture",
rr.DepthImage(
depth_image,
meter=1.0, # values are already in metres
colormap="turbo",
depth_range=(0.0, 3.0) # 0–3 metres
)
)
except Exception as e:
logger.error(
f"Unable to capture image. Caught exception: {type(e).__name__}: {e}"
)
finally:
camera.disconnect()
if __name__ == "__main__":
main()Explanation
Now, let's break down the code piece by piece.
A RealSense camera object is created with just a name. No serial number is required — the class connects to the first available device automatically.
camera = realsense.RealSense(
name="my_realsense",
)A Rerun viewer is opened with rr.init(..., spawn=True), then camera.connect() initializes the RealSense pipeline and makes the device ready to capture frames.
rr.init("RealSense_Capture_Example", spawn=True)
camera.connect()capture_single_depth_frame activates the depth stream, retrieves one frame, and returns it as a NumPy array of float values already converted to metres.
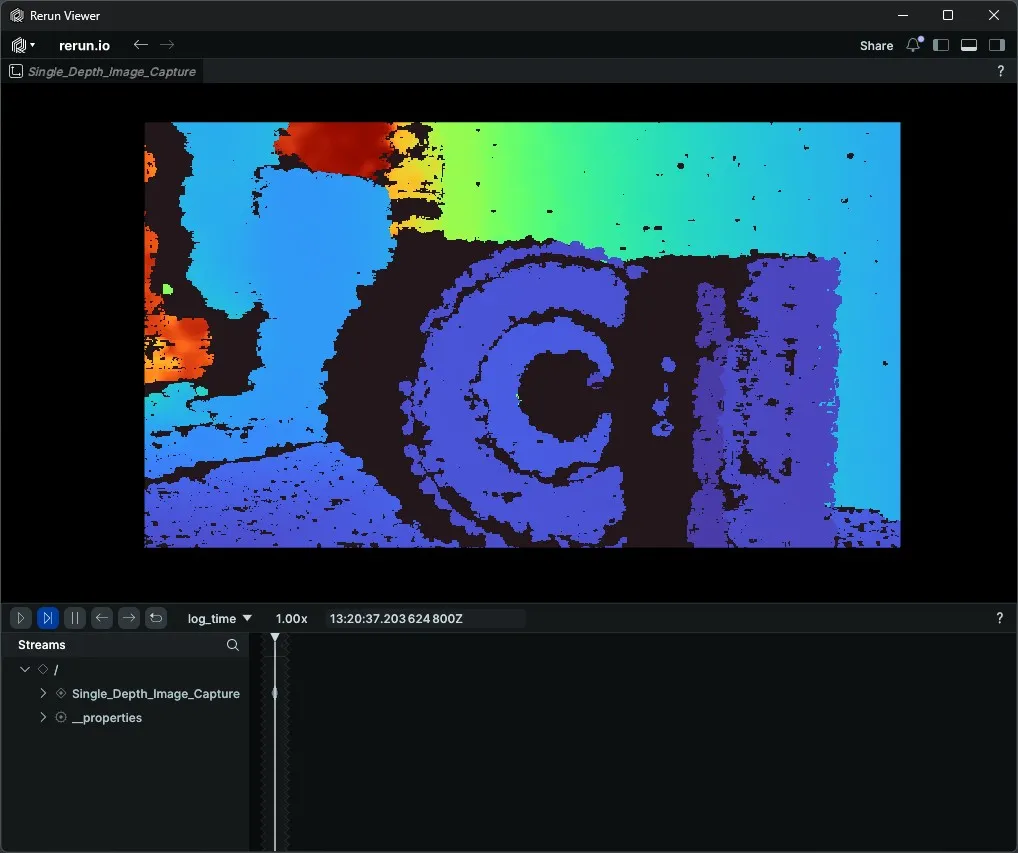
depth_image = camera.capture_single_depth_frame()rr.DepthImage renders the raw depth array as a false-colour image in Rerun. meter=1.0 tells Rerun the values are already in metres so no unit conversion is applied. colormap="turbo" maps close distances to blue and far distances to red. depth_range=(0.0, 3.0) clamps the colour scale to the 0–3 metre range, so objects outside that band are clipped rather than compressing the palette.
rr.log(
"Single_Depth_Image_Capture",
rr.DepthImage(
depth_image,
meter=1.0,
colormap="turbo",
depth_range=(0.0, 3.0)
)
)The finally block guarantees that camera.disconnect() is always called, stopping the RealSense pipeline and releasing all USB resources regardless of whether an exception occurred.
finally:
camera.disconnect()Run
python capture_depth_image_example.pyA Rerun viewer opens automatically. The depth frame appears under Single_Depth_Image_Capture with the turbo colour map applied.