RealSense — Capture RGB, Depth & Point Cloud
This example demonstrates how to use Tzara to generate a pipeline that captures all three RealSense data streams — color image, depth image, and point cloud — and visualizes them in Rerun.
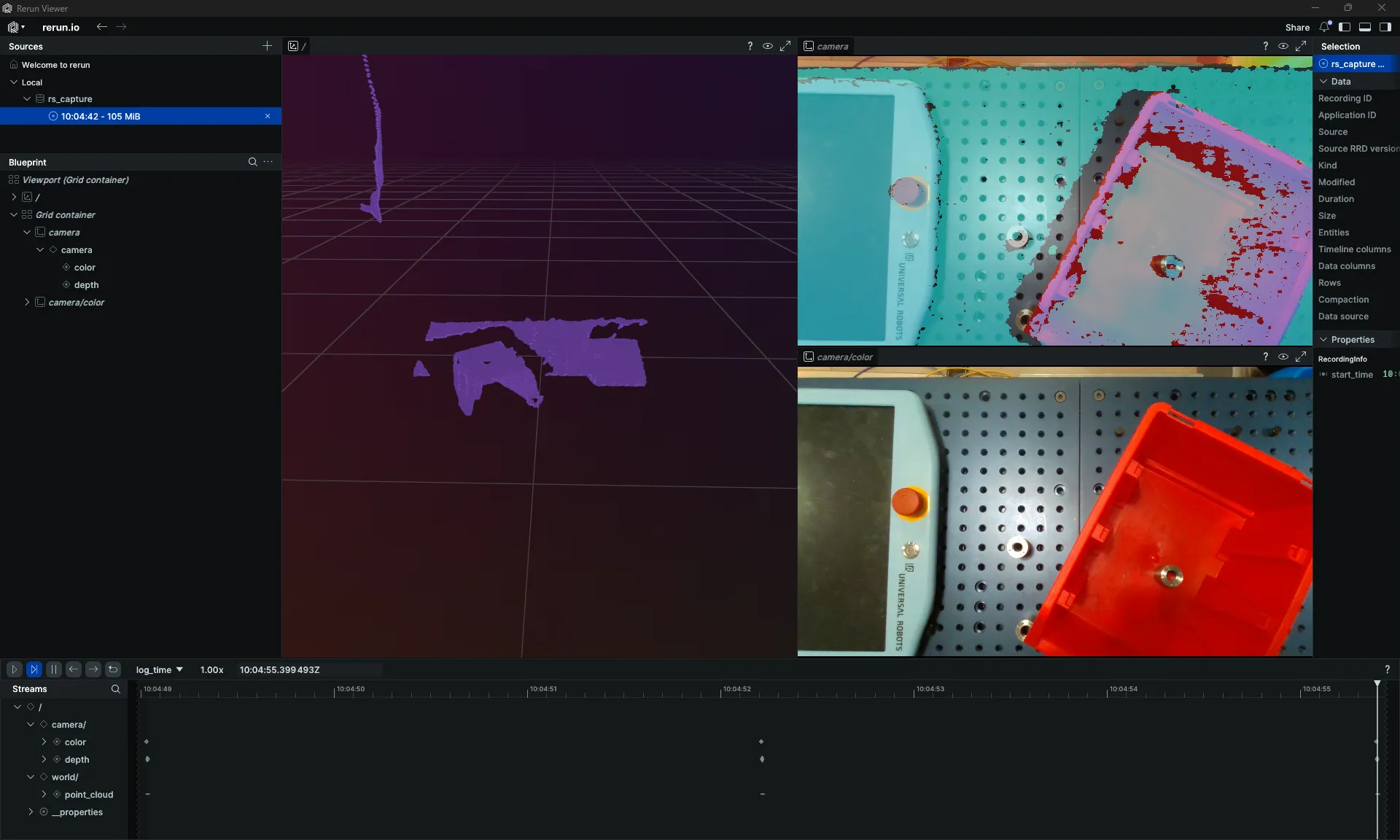
RGB image, depth map, and point cloud captured and visualized in Rerun
The Natural Language Instruction
Capture an image, point cloud, and depth from a RealSense camera and visualize them using RerunThe Generated Code
python
# Pipeline: Capture color image, depth image, and point cloud from RealSense
# and visualize all three in Rerun.
import numpy as np
import rerun as rr
import time
from telekinesis.medulla.cameras import RealSense
NUM_CAPTURES = 15
REST_SECONDS = 3
# Step 1: Instantiate and connect to RealSense camera
camera = RealSense(name="rs_capture")
camera.connect()
rr.init("rs_capture", spawn=True)
try:
for i in range(NUM_CAPTURES):
print(f"Capture {i + 1}/{NUM_CAPTURES}")
# Step 2: Capture color image, depth image, and point cloud
color_image = camera.capture_color_image()
depth_image = camera.capture_depth_image()
point_cloud = camera.capture_pointcloud()
# Step 3a: Log the color image
if color_image is not None:
rr.log("camera/color", rr.Image(color_image))
# Step 3b: Log the depth image
if depth_image is not None:
rr.log("camera/depth", rr.DepthImage(depth_image, meter=1.0))
# Step 3c: Log the point cloud
if point_cloud is not None:
positions = point_cloud.to_numpy("positions") if hasattr(point_cloud, "to_numpy") else None
if positions is None:
positions = np.asarray(getattr(point_cloud, "positions", None))
colors_arg = None
if point_cloud.has_colors():
colors = np.asarray(getattr(point_cloud, "colors"))
if colors.ndim == 2 and colors.shape[1] >= 3:
colors_arg = colors[:, :3]
if colors_arg is not None:
rr.log("world/point_cloud", rr.Points3D(positions, colors=colors_arg))
else:
rr.log("world/point_cloud", rr.Points3D(positions))
if i < NUM_CAPTURES - 1:
time.sleep(REST_SECONDS)
finally:
camera.disconnect()